如今,可穿戴设备正逐渐进入大众视野,传统可穿戴设备大多采用硬质材料,如辅助病人行走的外骨骼机器人等。然而,针对特殊应用场景和需求下,如何让可穿戴设备更加柔和、安全和穿戴舒适,同时具备灵活、精准的变形能力,是近年来柔性传感技术研究人员正在思考的问题,智能软机器人的概念也应运而生。目前大多数柔性传感器与驱动器的集成多依赖铸造、粘合或化学涂层等方法,这种“附加式”设计容易导致材料间界面应力不兼容,影响机器人的运动性能和稳定性。
为了解决这一难题,近期,江南大学纺织研究所孙丰鑫副研究员团队在《Cell Reports Physical Science》期刊上发表了一项创新成果。该团队利用工业编织技术灵活定制纱线组合,开发了一种基于织物工程设计的编织气动软机器人。该软机器人集成了定向驱动、双侧弯曲及自感知功能,展现了其在医疗护理和安全人机交互等领域的独特优势和广阔前景。
气动驱动器局限性
与柔性传感技术整合难题
传统软气动驱动器大多采用硅胶橡胶等弹性材料制成,但弹性材料在充气时会发生全方位的膨胀变形,导致驱动应变、输出力和效率受到限制。尽管研发人员尝试通过在弹性材料外部包裹纤维来增强方向性应变,但这种方法不仅增加了制备过程的复杂性,还提高了成本。
随着柔性传感技术的发展,智能软机器人的概念逐渐成形。然而,当前大多数柔性传感器与驱动器的集成方式多采用铸造、粘合或化学涂层等方法,这些“附加式”设计容易导致材料间界面应力不兼容,进而影响机器人的运动性能和稳定性。
孙丰鑫副研究员团队通过分析气动驱动器与传感器整合问题,利用创新的织物编程设计方法,通过工业编织技术灵活定制纱线组合,实现了多功能集成的编织气动软机器人。该方法不仅成本效益高,而且易于定制,为软机器人的大规模生产提供了更多的可能性。
编制执行器的结构与性能
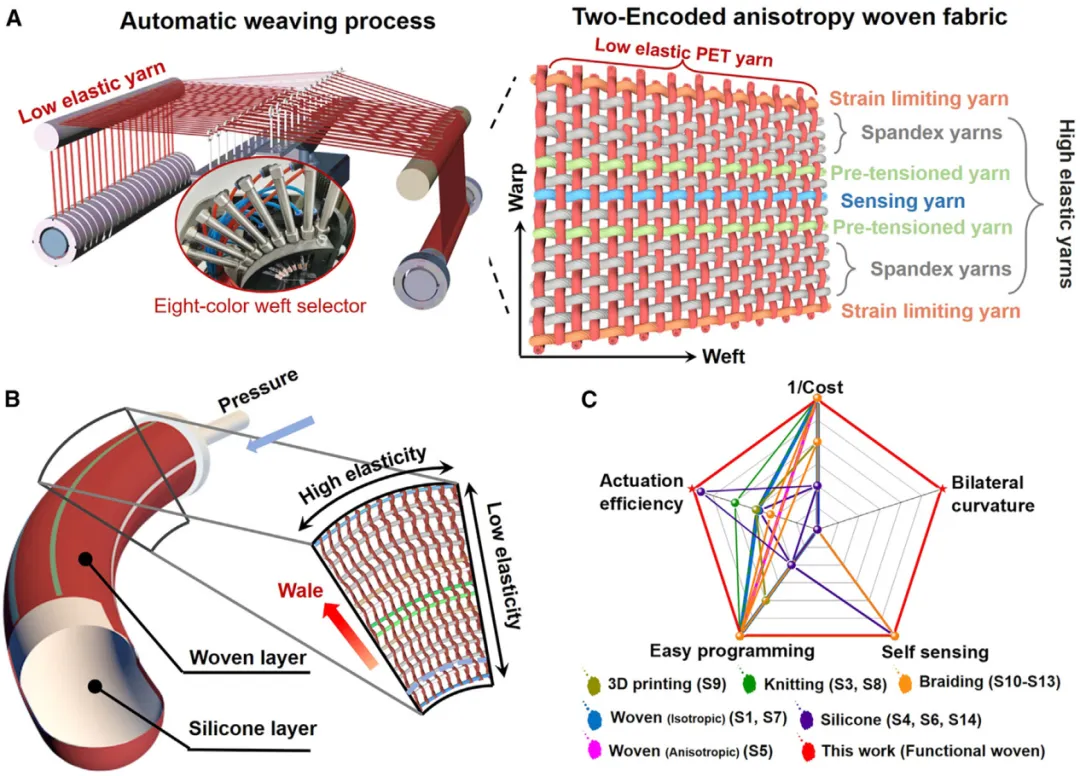
孙丰鑫团队使用了一种特殊材料打造,编织层中的经纬纱系统使得织物具备高度的各向异性力学特性,这是实现高效、可控变形的关键。低弹性的聚酯(PET)纱线作为经纱,保证了织物的稳定性和一致性;而高弹性的氨纶包芯纱作为纬纱,则赋予了织物在特定方向上的弹性变形能力。
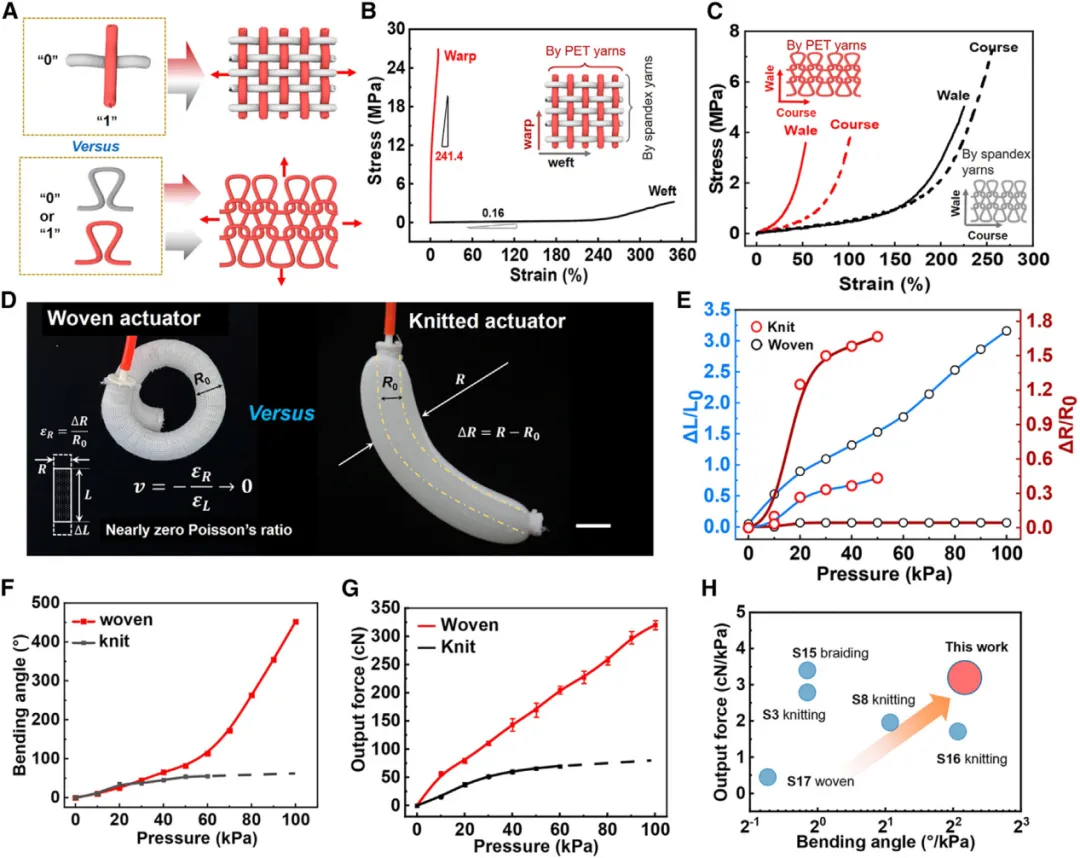
通过织物结构和材料组合,孙丰鑫副研究员团队打造的编织驱动器在充气变形时展现出了近零泊松比特性。这意味着在纵向伸长时,驱动器的径向膨胀几乎为零,从而大大提高了驱动应变(高达2,250 m-1)和输出力(30 N MPa-1),同时增强了机械性能的鲁棒性。
编织层的表征和编织致动器的致动性能
为实现双侧弯曲变形,研究团队在编织过程中集成了预张力弹性纱线和限应变纱线。预张力纱线在未充气状态下自然收缩,使驱动器向一侧弯曲;而在充气过程中,由于织物层不同区域的弹性差异,驱动器会向另一侧反向弯曲,从而实现了正、负曲率的灵活调控。
此外,内置的应变感知纱线是该技术的另一大亮点。该纱线由银丝编织而成,紧密围绕预拉伸的氨纶丝排列。当驱动器弯曲时,应变感知纱线受到拉伸,导致纱线电阻发生变化,从而实时监测并反馈驱动器的弯曲状态。这种设计将传感与驱动功能完美融合,避免了传统“附加式”传感器带来的界面应力不兼容问题。
为了验证织物编织气动软机器人的性能,孙丰鑫副研究员团队对其进行了测试,由于采用了独特的编织工艺和材料选择,驱动器在充气时能够实现近乎零泊松比的变形,这意味着在径向几乎不膨胀的情况下,驱动器能够沿纵向大幅伸长,从而显著提高了弯曲应变和输出力。
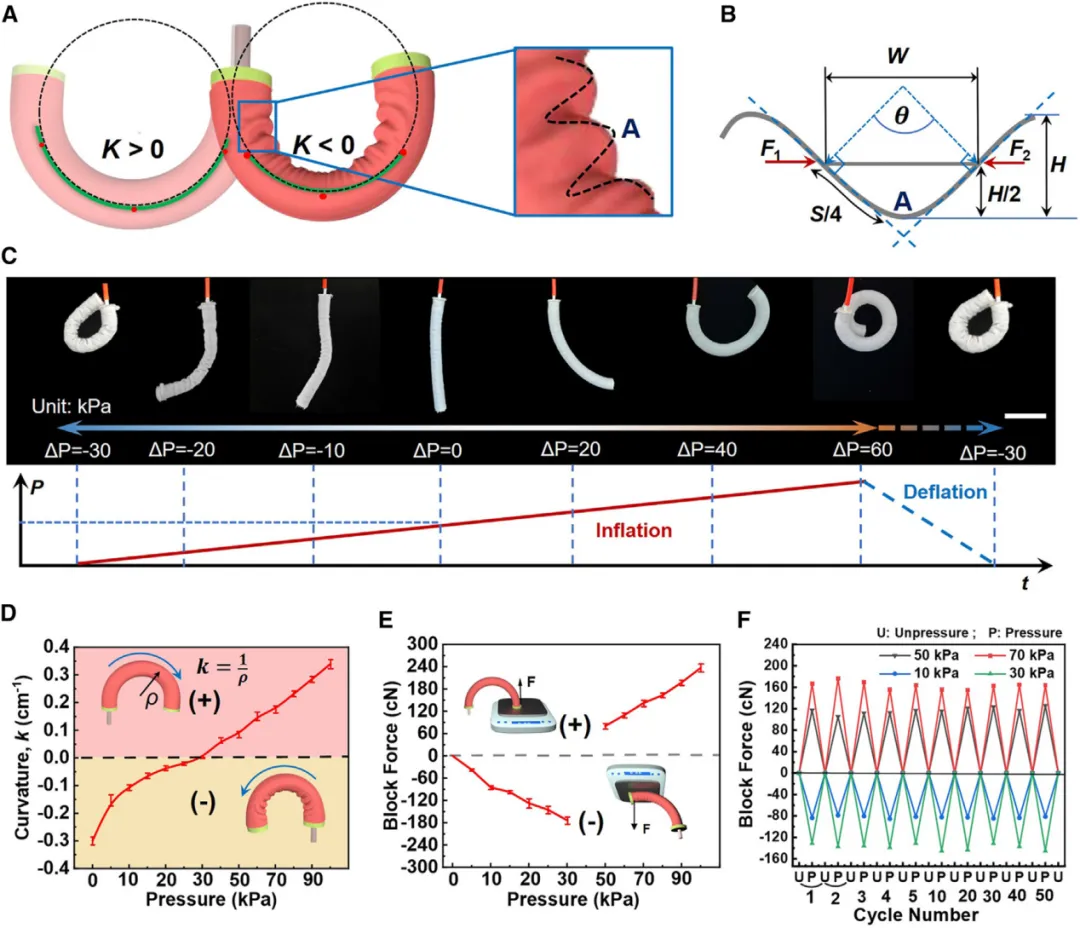
其次,驱动器在双侧弯曲变形能力方面同样表现出色。通过集成预张力弹性纱线,驱动器能够在充气过程中实现正向和反向弯曲,且弯曲曲率可通过调整预张力大小进行定制化设置。这种双侧弯曲变形能力不仅增强了驱动器的适应性和灵活性,还为其在复杂环境中的应用提供了更多可能性。在实验中,驱动器在不同气压下表现出稳定的弯曲曲率和输出力,验证了其设计的有效性和可靠性。
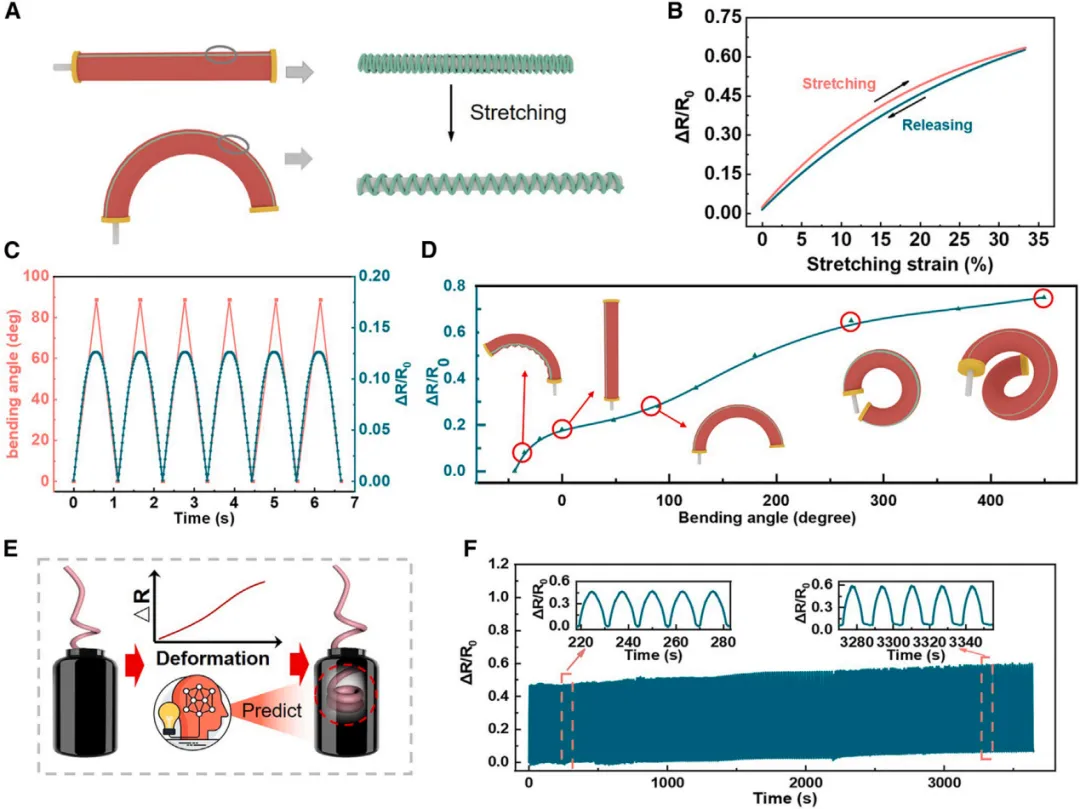 在传感性能方面,内置的应变感知纱线通过实时监测电阻变化来反馈驱动器的弯曲状态,实现了高精度的自我感知能力。这种自我感知能力使得驱动器能够在不可见环境中有效预测和调整自身运动状态,为智能软体机器人的发展提供了重要支持。
在传感性能方面,内置的应变感知纱线通过实时监测电阻变化来反馈驱动器的弯曲状态,实现了高精度的自我感知能力。这种自我感知能力使得驱动器能够在不可见环境中有效预测和调整自身运动状态,为智能软体机器人的发展提供了重要支持。
此外,应变感知纱线在多次拉伸-释放循环中表现出良好的稳定性和耐久性,确保了驱动器在长期和快速应用中的可靠性。
聚焦医疗健康与可穿戴设备领域
商业路径清晰
传统刚性外骨骼设备在医疗康复过程中存在舒适度低、适应性差等问题,而织物编织气动软机器人以其柔软、透气、轻便的特性,为患者提供了更为舒适和个性化的康复体验。在实际场景的表现当中,织物编织气动软机器人可作为辅助肢体运动的穿戴设备,帮助患者在康复过程中进行精准、高效地训练,加速恢复进程。同时,其双侧弯曲变形能力和自感知功能使得驱动器能够根据患者的实际需求进行动态调整,实现个性化康复方案。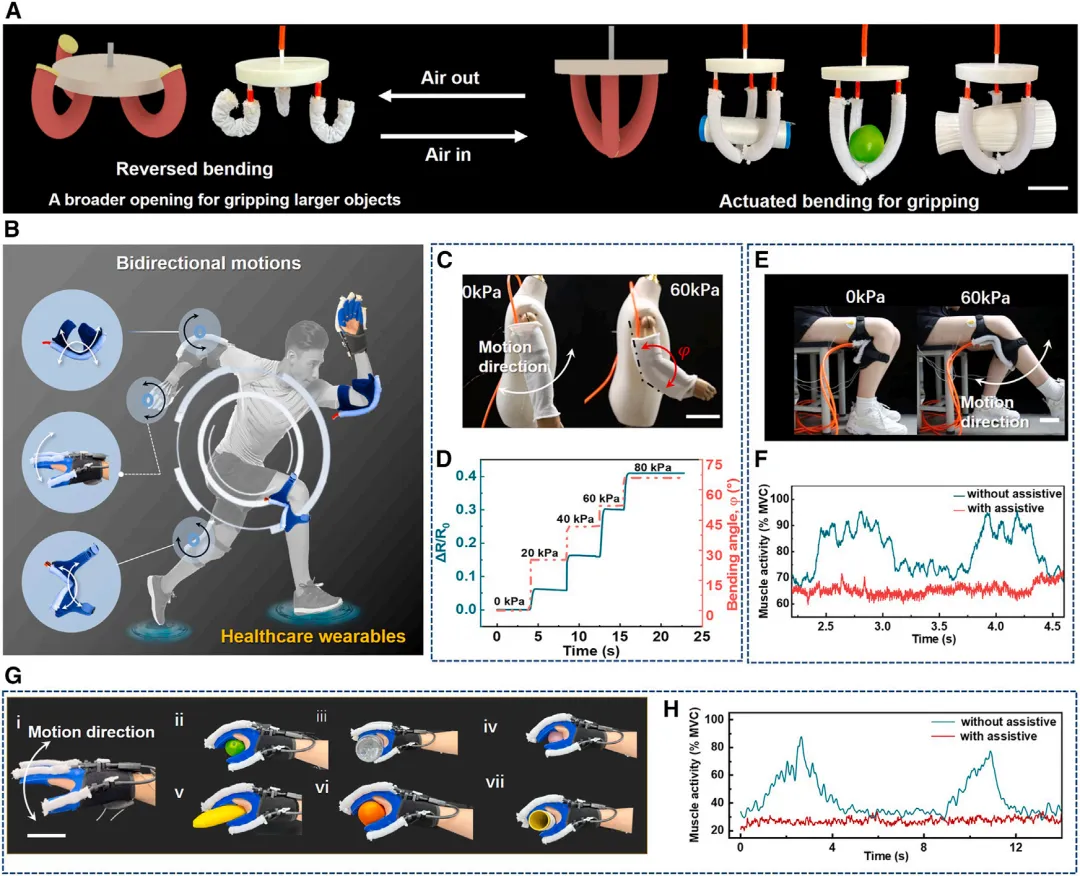
编织执行器在软夹持器和医疗保健可穿戴设备中的应用
由于采用织物编织软材料设计,该机器人可广泛应用于智能手环、智能鞋垫、智能衣物等各类可穿戴产品中。通过集成传感器和运动监测算法,该机器人不仅能实时监测用户的运动状态和健康状况,还能根据用户的实际需求提供个性化的运动建议和健康管理方案。
通过将纺织制造的原理与尖端的机器人和传感技术相结合,这一创新为提升康复体验提供了新的灵活性和功能性。随着这项技术的不断发展,它有潜力彻底改变我们对康复和辅助可穿戴设备的看法,让这些设备变得更加有效、舒适和易于接触,帮助更多需要帮助的人。基于机织结构的易调控性和力学的独特性,其已经在多个领域具有广泛应用。可预见到机织结构软体驱动器也将会有进一步发展与实际应用。
本文内容来源于江南大学,由魔方实验室整理发布。我们尊重原创作者的权益,并致力于提供准确、有价值的信息。若本文内容涉及版权问题,请权利人及时与我们联系,我们将按照相关法律规定,尽快予以妥善处理。



发表评论 取消回复